


Iş prinsipiplaneta rolikli nurbat: gabat gelýän motor nurbady aýlanmaga iterýär we hereketlendiriji rulonlaryň üsti bilen hereketlendirijiniň aýlanma hereketi hozuň çyzykly garşylykly hereketine öwrülýär. Planeta rolikli nurbat spiral hereketi we planetar hereketi birleşdirýär, bu has ýokary öndürijilik talaplary bilen hemmetaraplaýyn ýagdaýlar üçin örän amatly.
Planeta rolikli nurbat şekilde görkezilýär. Onuň esasy düzüm bölekleri:
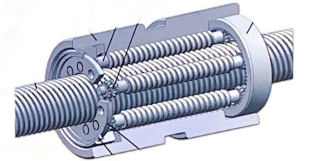
Buraw, onuň ýüp tertibi dogry üçburçluk (3 kelleli we ondan ýokary sapaklar)
Nut, içerki sapak profiliniň nurbady bilen deňdir.
Roller, bir başlangyç sapak, her rulonyň ujunda rulonlaryň radial ugurda deň paýlanmagyny üpjün etmek üçin aýlawyň tegelek deşigine silindr görnüşli we dişli pyçak bar. Dişli dişler içerki halka dişli bilen örtülýär, rolikiň birsydyrgyn öňe gitmegine mümkinçilik berýär.
Rhalka,päsgelçiligi gulplamak.
Tekiz açarsürülýän zatlary birikdirmek üçin ulanylýar. Simpleönekeý gurluşy bar, sökmek we ýygnamak aňsat we gowy hedis häsiýetlerine eýe. Speedokary tizlik, üýtgeýän ýük we täsir ýagdaýlary üçin amatly.
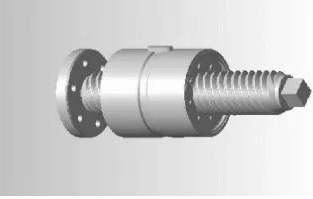
Ters planeta rolikli nurbat, ters rolikli nurbat we ters planeta rolikli nurbat diýlip hem atlandyrylýar, rolikleriň tertibi ýa-da hereket ugry adaty planetar rolikli nurbadyň tersine çyzykly geçiriji enjamy aňladýar.
Ters planetar rolikli nurbat kiçijik ululykda we uly ýükde. Ramkasyz hereketlendiriji bilen, gumanoid robot gollary, aýaklary, kalça bogunlary we ş.m. ulanylyp bilner.
Adaty planeta rolikli nurbatlar ýokary tizlikli, güýçli ýük göterijilik ukyby we ýokary takyklyk artykmaçlyklaryna eýedir. Netijeli urgy bir metrden gowrak bolup biler, bu bolsa gaty agyr ýük şertleri üçin örän amatly bolar.
Nurbat üçin täze çykarylýan nokat üçin gumanoid robot. Trapezoidal nurbat wetop nurbatymehaniki maşyn gurallary pudagynda kämillik ýaşyna ýeten, planetanyň rolikli nurbaty häzirki wagtda diňe awiasiýa we beýleki ýokary derejeli programmalarda. Tesla humanoid maşyn 14 çyzykly açar 8-10 rolikli nurbat ulanar.
Iş wagty: Dekabr-06-2024




